About Me
Personal
I've been drawn to engineering for as long as I can remember. Growing up in Texas, I was captivated by space exploration — the idea that humans could build machines capable of traversing the surface of Mars or the Moon felt like the most exciting problem in the world. That fascination never left me, and it shaped every decision I made on the way to where I am today.
Chasing that passion led me to pack up and move from Texas to Massachusetts to pursue a degree in Robotics Engineering at WPI — a commitment I made without hesitation, because building intelligent machines isn't just a career path for me, it's what I'd be doing anyway. Outside of work I'm always tinkering on side projects, whether that's prototyping hardware, writing software for fun, or finding a new problem worth solving.
That's the part of engineering I love most — the moment a problem lands in front of you and you get to figure it out. The tools change, the domain changes, but that feeling never does.
Background
I'm a Software Engineer III and Team Lead at Autonodyne, where I design and ship production software for autonomous platforms. Promoted to team lead within my first year, I own project roadmaps, lead cross-functional engineering teams, and translate technical work directly into business impact.
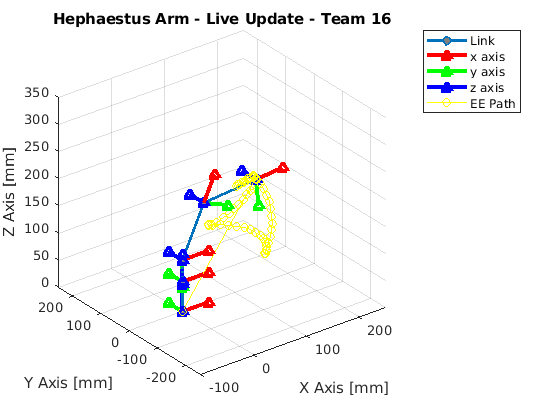
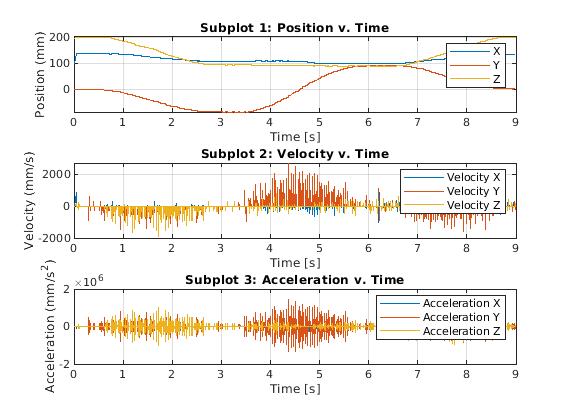
My background spans the full autonomous systems stack — from C++ messaging infrastructure and MAVLink protocols to LiDAR sensor fusion pipelines and computer vision navigation. I hold a B.S. in Robotics Engineering with a Minor in Computer Science from Worcester Polytechnic Institute, where I competed in NASA's Robotics Mining Competition as part of my senior capstone.
I thrive at the intersection of hardware and software, turning complex systems requirements into reliable, well-architected code.
Senior Thesis